Trong tháng 3, nhóm nghiên cứu gồm TS. Lê Xuân Hải và các em sinh viên ưu tú đến từ một số trường Đại học đã xây dựng hoàn chỉnh mô hình xe tự hành trên cơ sở máy tính nhúng và IoT.

Hình 1. TS. Lê Xuân Hải cùng các em sinh viên trong nhóm nghiên cứu
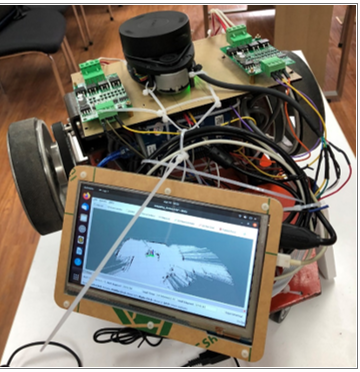
Hình 2: Mô hình xe tự hành được xây dựng dựa trên máy tính nhúng kết hợp với vi điều khiển STM32F411.
Hệ thống xe tự hành gồm có mô hình xe ba bánh có gắn hai động cơ tương ứng trên mỗi bánh và một bánh tự lựa, một vi điều khiển ARM STM32F411, một máy tính nhúng Jetson nano và một màn hình 7 inch LCD. Máy tính nhúng có nhiệm vụ thu thập và xử lý dữ liệu từ cảm biến (mắt máy), sau đó truyền tín hiệu tới vi điều khiển STM32F411 để xử lý và điều khiển các động cơ bánh xe. Thuật toán điều khiển được xây dựng dựa theo luật vi tích phân tỉ lệ (PID- Proportional Integral Derivative), luật điều khiển PID mờ. Nhóm nghiên cứu đã khai thác các công cụ trong hệ điều hành ROS (Robot Operating System), ứng dụng cảm biến Lidar, và các kết quả thử nghiệm ban đầu cho thấy xe tự hành có thể định vị, tự điều hướng và xây dựng được bản đồ khu vực di chuyển. Bên cạnh đó, nhóm đã ứng dụng module wifi ESP8266 để cho phép điều khiển xe tự hành từ xa thông qua máy tính hoặc điện thoại.
Trong thời gian tới, nhóm nghiên cứu tiếp tục phát triển các giải thuật điều khiển cho xe tự hành khi xét đến các yếu tố bất định, chẳng hạn như các tải trọng khác nhau được đặt lên xe.
TS. Lê Xuân Hải
Khoa Các khoa học ứng dụng, Trường Quốc tế, Đại học Quốc Gia Hà Nội